






Inputs and Outputs
Getting Information, Changing the World
Lessons You Should Know

We’ve been going over how to write code and change things like the LCD screen using code- now let’s take a moment to talk about how the robots actually use that code to do stuff.
Here’s what we’ll be covering on this page:
Inputs
An input is any way that a robot or computer takes information into its system. (A way to put information inside, makes sense, right?) Really there are three main types of input that people talk about:
- Sensors
- Computer chips
- Interfaces
Most inputs are a combination of a couple of these things. (And really, interfaces are just a bunch of sensors.)
Sensors are how computers and robots get information about the world. Sparki has infrared inputs, an ultra-sonic input and many others. Each sensor is especially designed to sense a certain type of information. The sensors convert information about their environment into an electrical voltage and send that electrical signal to the robot’s microcontroller (the robot’s brain).
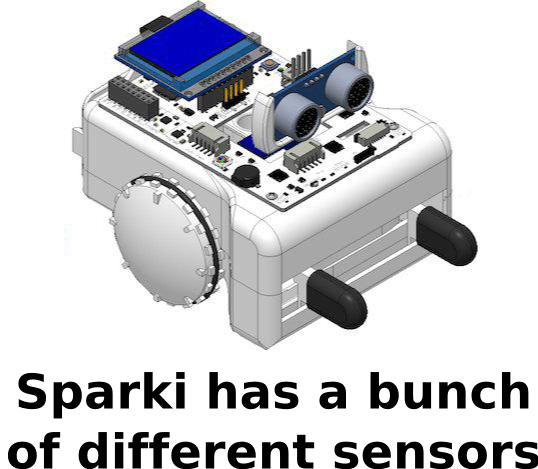
Sensors can usually only sense one thing about the world- and sometimes it’s a specific thing about that one thing. For example a robot might have a light sensor which senses photons. If more specific information is required that robot may also have a light sensor which senses the color of the light or the frequency of the photons. Sensors can be pretty broad or they can be extremely specific, it all depends on what you need to do with them!
Computer chips are used for a whole bunch of things in robots. Often you will find them combined with sensors or as part of a communication system. They are also often used to do math that might take a robot a while to do on its own. Sparki’s magnetometer (sort of a compass) and accelerometer are great examples of sensors that are in a chip form.
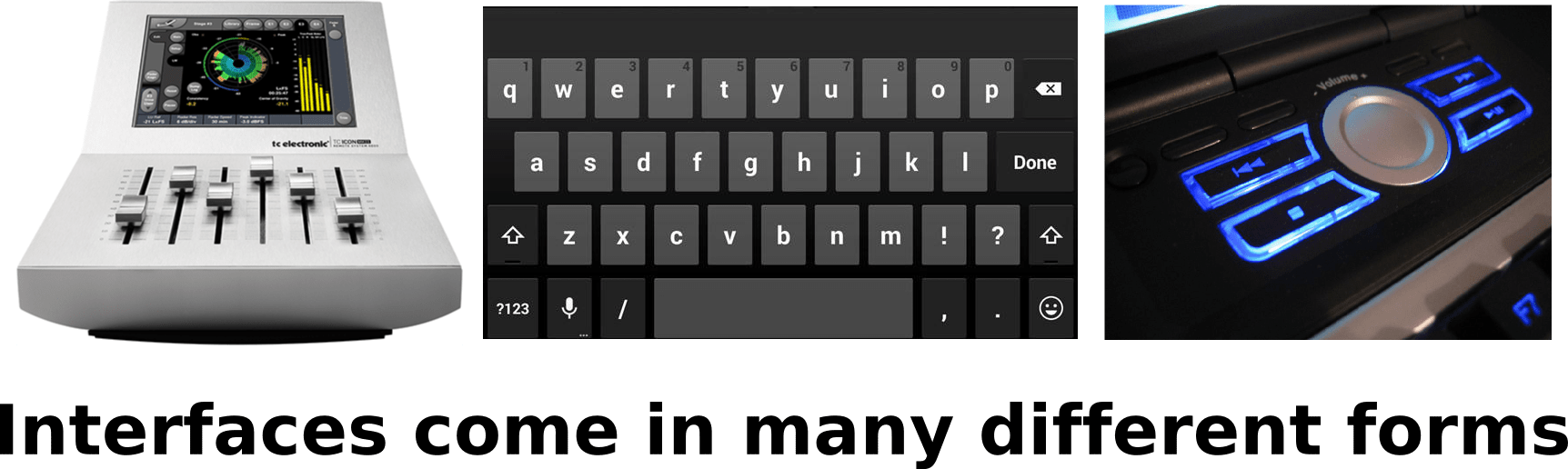
Interfaces are anything you can use to change or get information from a robot. You’re using an interface right now to look at this information and click around the internet. Interfaces are usually both an input and an output. The input partr of an interface is also usually made up of a bunch of input sensors and probably a couple chips.
One of the most common interfaces, your keyboard has a ton of input sensors on it- buttons! Another common interface, touch screens, have an output in the form of the screen and an input in the form of a capacitive film on top of the screen to sense your finger.
Anything with a button, dial or other sensor is technically an interface. Other interfaces might not even have anything you press or touch- they may be a communication receiver of some sort. Light switches, garage door openers and dishwashers are all examples of systems that have interfaces. Even when you are not pressing buttons on your television it is interfacing with the satellites that provide the channels. Now that you know what an interface is, when you look around you’ll see them all over the place!
You can think of a robot’s sensors kind of like its eyes, ears, nose, mouth and skin. The robot uses its sensors the same way we use ours- to get information about the world around us. Only once we know what is going on in the world can we start to think about moving around, beeping (singing) and moving things.
Outputs
An output is anything that allows a robot to change the physical world. This may be something pretty obvious, such as a motor that moves the robot around in the world. Then again, it may not be so obvious to us humans, like the infrared light that Sparki sometimes emits. Outputs come in many different forms- it’s actually easier to list how robots output than the actual parts that do the outputting since there are so many different types! Here are the main categories of actions that robots do with outputs:
- Movement- with motors, servos and engines
- Sound- with buzzers, speakers, mp3 units and sonic sensors
- Light- with LEDs and infrared emitters (which are really just fancy LEDs)
- Wireless communication- with radios
Without outputs robots would be pretty boring. They would have no way to do anything to the world and we wouldn’t be able to tell if what we put into their inputs was doing anything either! Next time you see a robot or machine, take a moment to think about how it is interacting with the world. A simple robotic arm probably has at least three different motors, usually a lot more! It takes a lot of outputs working together to help a robot actually do something.
Communication
Robots can communicate in a whole bunch of different ways. Communication is also usually a combination of both input and output. The robot listens to hear incoming communication and sends out communication using an output. Some robots only have one way communication because they only need to listen or speak. There are many different ways that robots communicate. Some require wires while others are wireless. Here’s a short list of some of the ways that robots communicate with each other:
- Over wires- plain old wires, USB or fiber optics
- Simple radios
- Bluetooth– these are actually just radios with some software
- WiFi- a wireless connection to the internet
- Light- like the fiber optics above (but without the wires to hold it) or using lasers

These days a lot of robots are connected to each and to the internet. There’s a lot of communication going on all around us.
Next Step:
Now that we have a little more information about inputs and outputs let’s take a look at the two different ways the robot can do these things.